
كاميرا عمق RealSense للروبوتات والمسح ثلاثي الأبعاد والذكاء الاصطناعي
استشعار ثلاثي الأبعاد عالي الدقة وتتبع للحركة وإدراك مكاني باستخدام كاميرات RealSense D435f وD435if.
المعدات التكنولوجية / فاب لاب / كاميرا عمق

رؤية مكانية دقيقة للأنظمة الذكية
امنح الروبوتات والماسحات وأنظمة الذكاء الاصطناعي القدرة على فهم المسافة والشكل والحركة.
لا تلتقط كاميرا العمق صورة مسطحة فقط، بل تنشئ خريطة عمق لحظية تساعد الآلات على التنقل والقياس والفحص وإعادة البناء والتفاعل مع البيئة الفعلية.
شاهد الرؤية المكانية أثناء العمل
يوضح هذا الفيديو كيف يساعد استشعار العمق الأنظمة الذكية على فهم المسافة والحركة والمساحة ثلاثية الأبعاد في تطبيقات الروبوتات والمسح والذكاء الاصطناعي.
ما هي كاميرا العمق؟
كاميرا العمق هي كاميرا استشعار ثلاثي الأبعاد تقيس المسافة بينها وبين الأجسام في المشهد. وبخلاف كاميرا RGB التقليدية، تنتج بيانات عمق يمكن تحويلها إلى سحابة نقاط أو قياسات أو خرائط عوائق أو نماذج ثلاثية الأبعاد، ما يجعلها مناسبة للروبوتات والمسح ثلاثي الأبعاد والرؤية المكانية والأتمتة والذكاء الاصطناعي الفيزيائي.
كيف تعمل RealSense Depth Camera؟
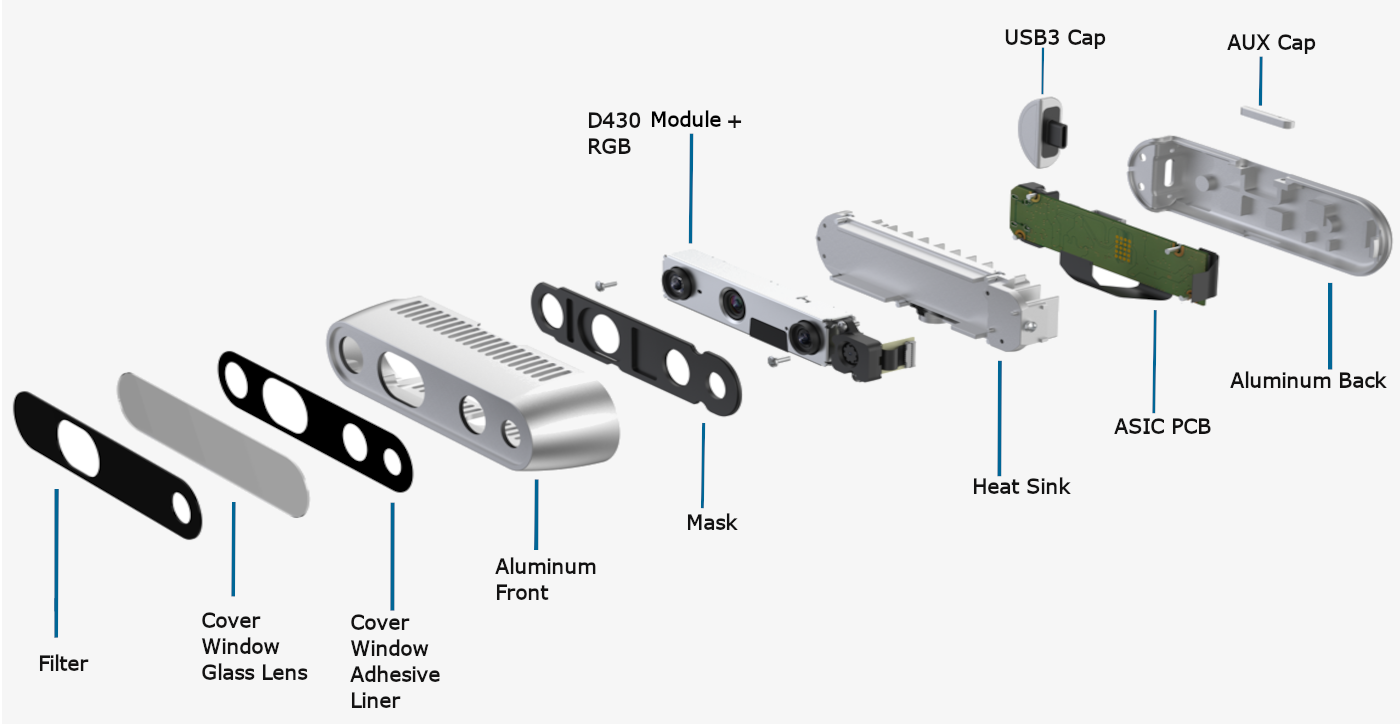
تعتمد كاميرات RealSense أساساً على الرؤية المجسمة النشطة. يوضع مستشعران للأشعة تحت الحمراء على مسافة صغيرة من بعضهما لمحاكاة الرؤية الثنائية، ثم تقارن الكاميرا الصورتين وتحسب العمق بتقنية التثليث.
وعند التعامل مع الأسطح الخالية من التفاصيل، مثل الجدران البيضاء، يعرض جهاز مدمج نمطاً غير مرئي بالأشعة تحت الحمراء ليمنح المستشعرين نقاطاً واضحة للمطابقة وحساب العمق بسرعة.
التقنية الأساسية والمزايا الرئيسية
رؤية مجسمة نشطة
مستشعران للأشعة تحت الحمراء وتقنية التثليث وجهاز إسقاط مدمج لاستشعار العمق لحظياً.
إدراك مكاني
إنتاج خرائط عمق وسحابات نقاط للتنقل والقياس والتتبع والفحص وفهم المشهد.
تكامل لحظي
ربط بيانات العمق بسهولة مع الروبوتات والرؤية الحاسوبية والمسح والأتمتة والذكاء الاصطناعي.
تصميم مدمج
حجم مناسب للروبوتات المتنقلة والمختبرات وأنظمة الفحص ومنصات البحث والتطوير.
الموديلات المدعومة: D435f وD435if
RealSense D435f
كاميرا عمق مصممة لتقديم رؤية مجسمة موثوقة في تطبيقات الروبوتات والمسح والبحث والرؤية الحاسوبية.
RealSense D435if
خيار استشعار عمق للفرق التي تحتاج إلى بيانات مكانية قوية ومرونة تكامل ضمن الأنظمة الذكية.
تكامل البرمجيات والمنصات
- لغات البرمجة
- Python وC++ وC# وJava
- المنصات
- Windows وLinux (Ubuntu) وAndroid وmacOS
- الروبوتات
- حزم ROS وROS2 لسحابة النقاط ورسم الخرائط والتنقل
استخدامات كاميرا العمق
كاميرا عمق للروبوتات
اكتشاف العوائق وتحديد الموقع والتنقل والتحكم والتفاعل الآمن مع البيئات المتغيرة.
كاميرا عمق للمسح ثلاثي الأبعاد
التقاط الأشكال الهندسية وإنشاء سحابات نقاط ونماذج رقمية وإجراء القياسات والتحليل.
كاميرا عمق للذكاء الاصطناعي والرؤية الحاسوبية
إضافة سياق مكاني للتعرف والتتبع والفحص والتفاعل بين الإنسان والآلة والذكاء الاصطناعي الفيزيائي.
لماذا أصفان؟
تساعد أصفان الجامعات ومراكز البحث والمكاملين والفرق الصناعية على اختيار كاميرا الرؤية المكانية المناسبة وتشغيلها. نربط العتاد بالبرمجيات وتطبيقات الروبوتات والمسح ثلاثي الأبعاد لتحويل بيانات العمق إلى نتائج عملية.
- اختيار الموديل والتوجيه التقني وفق التطبيق
- دعم التكامل لمشاريع الروبوتات والمسح ثلاثي الأبعاد والذكاء الاصطناعي
- حلول مترابطة للفاب لاب والروبوتات والمسح ثلاثي الأبعاد
أسئلة شائعة
أضف رؤية مكانية أدق إلى نظامك القادم.
تواصل مع أصفان لاختيار حل RealSense Depth Camera للروبوتات أو المسح أو الرؤية الحاسوبية أو الذكاء الاصطناعي الفيزيائي.
اكتشف المزيد الفئات

حلول هندسية وتقنية ذات صلة
معدات مختبرات هندسية ومعدات تكنولوجية وحلول تدريب للمؤسسات التعليمية.
تصنيع رقمي، CNC، روبوتات، مسح ثلاثي الأبعاد، ومعدات نمذجة أولية.
مختبرات جامعية وذكية وورش عملية ومرافق بحث وتدريب هندسي.
أنظمة طابعة خرسانية ثلاثية الأبعاد للمختبرات والبحث وتقنيات البناء.
طباعة دقيقة لمختبرات البحث والنمذجة والتعليم الهندسي.
كاميرات رؤية مكانية للروبوتات والمسح ثلاثي الأبعاد والأتمتة ومختبرات الذكاء الاصطناعي.
نرحب بأسئلتكم، لا تترددوا في الاتصال بنا
- إنشاء تجارب الواقع الافتراضي والواقع المعزز بأفضل الأسعار
- تجهيز المعامل الهندسية بأفضل الأجهزة
- جولات افتراضية بتقنية 360° وأيضًا ميزة يمكنك رؤيتها من خلال رابط فقط
- إنشاء تجارب الواقع الافتراضي والواقع المعزز بأفضل الأسعار
- تجهيز المعامل الهندسية بأفضل الأجهزة
- جولات افتراضية بتقنية 360° وأيضًا ميزة يمكنك رؤيتها من خلال رابط فقط